Different processors and instruction set architectures have always fascinated me. As a child of the late 70s and 80s I ...
Different processors and instruction set architectures have always fascinated me. As a child of the late 70s and 80s I ...
A few years back I purchased a SiFive HiFive1 Rev B board to join in the RISC-V revolution. In this ...
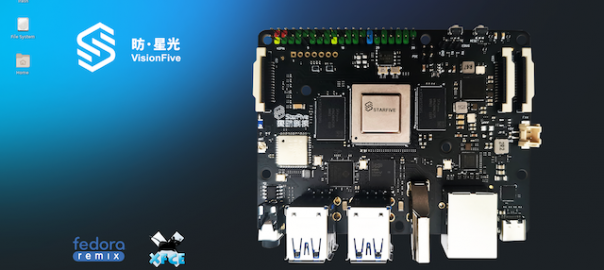
I’ve been excited to get my hands on a StarFive VisionFive and it finally arrived last week after being on ...
In our last post we looked at the GPIO pins of the SiFive HiFive1 Rev B board, and in this ...
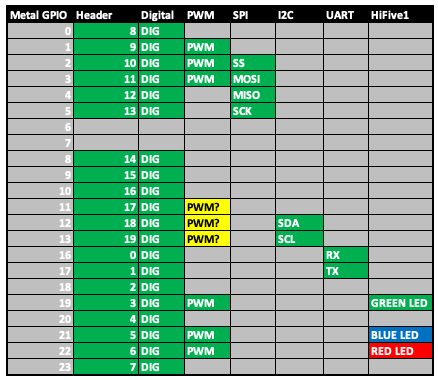
Let’s make use of the HiFive1 Rev B schematics to map out the GPIO controller device pins. Of particular interest ...

Today I’d like to introduce you to a new development board, the HiFive1 Rev B. Equipped with a RISC-V Freedom ...